基于DSP+FPGA方案,采用第二代软件框架(与代导航接收机软件框架相比较其特色为):
在第二代中加入卫星信号快捕模块,模块结构设计巧妙,捕获速度快的同时占用FPGA资源极少。
数据更新率由原来的1Hz提高到10Hz
冷热启动时间大大缩短
程序结构精炼,紧凑
系统参数配置灵活,方便调整
程序模块化,易于移植
程序模块可在不同导航系统接收机开发中灵活复用
结构适合多模接收机开发
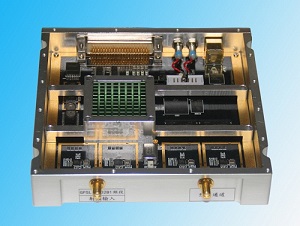
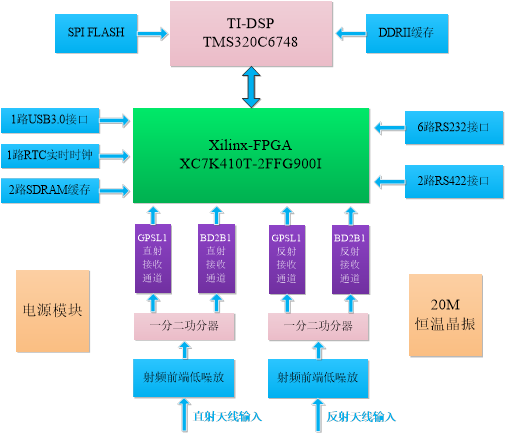
硬件原理结构框图:
主要技术性能指标:
频率: GSP L1 ->1575.42±1.5MHz BD2 B1 -> 1561.098±2.5MHz
灵敏度: ≥-130dBm
通道数: GSP L1 : 12通道 BD2B1 : 12通道
定位精度:
参数 | GPS L1 | BD2 B1 | GNSS |
位置 | 水平10 | 7.5 m | 10m | 7.5 m |
高程10 | 10 m | 15 m | 10 m |
速度 | 水平10 | 0.1m/s | 0.1m/s | 0.1m/s |
高程10 | 0.15m/s | 0.15m/s | 0.15m/s |
初始定位时间:
参数 | 冷启动 | 热启动 | 重捕(失锁<=10) |
时间(s) | 32 | 10 | 2 |
动态性能:
数据更新率:10Hz
快捕模块捕获速度:
1秒钟内捕获完整GPS L1 32颗星,多谱勒范围为-16KHz~+16KHz
1秒钟内捕获完整BD2 B1 37颗星,多谱勒范围为-16KHz~+16KHz
有大动态特殊需求用户速度可扩展到10km/s,多谱勒捕获范围可扩展至-48KHz~+48KHz
数据I/O:
2个232电平异步串口
1)串口缺省波特率为115200bps
2)数据传输格式:NMEA0183格式,自定义二进制格式
1个USB3.0高速传输接口
工作电压:
工作电流: <=1A
全套设备软件清单:
DSP程序固化工具-BootLoader
GPSL1+北斗二代B1双模卫星导航接收机-DSP源程序
GPSL1+北斗二代B1双模卫星导航接收机-DSP源程序说明文档
GPSL1+北斗二代B1双模卫星导航接收机-FPGA基带处理源程序
GPSL1+北斗二代B1双模卫星导航接收机-FPGA源程序说明文档
GPSL1_SoftReceiver_MATLAB-基于GPSL1频点中频信号采集和Matlab算法验证程序
BD2B1_SoftReceiver_MATLAB-基于北斗二代B1频点中频信号采集和Matlab算法验证程序
GPSL1+北斗二代B1双模卫星导航接收机-方案设计说明
GPSL1+北斗二代B1双模卫星导航接收机-上位机监控软件
GPSL1+北斗二代B1双模卫星导航接收机-上位机软件使用说明书
GPSL1+北斗二代B1双模卫星导航接收机-上位机软件源程序
GPSL1+北斗二代B1双模卫星导航接收机-上位机软件源程序说明文档
GPSL1+北斗二代B1双模卫星导航接收机-串口协议说明
GPSL1+北斗二代B1双模卫星导航接收机-硬件板卡测试例程
GPSL1+北斗二代B1双模卫星导航接收机-硬件板卡使用说明书
GPSL1+北斗二代B1双模卫星导航接收机-硬件板卡硬件设计说明书
GPSL1+北斗二代B1双模卫星导航接收机-硬件板卡原理图
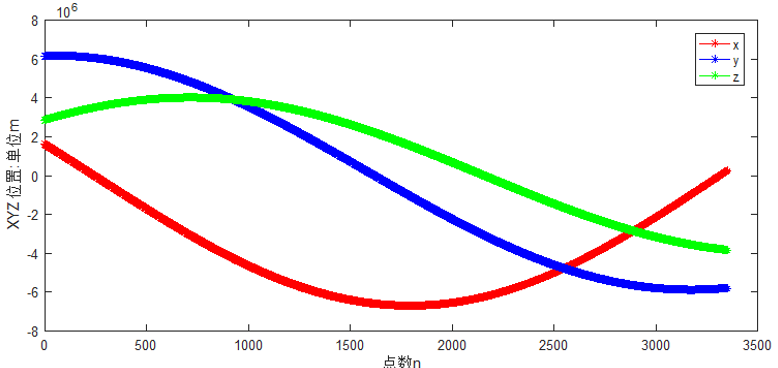
附接收机动态测试定位测速精度曲线
接收机运行后获得XYZ坐标轨迹如下图所示
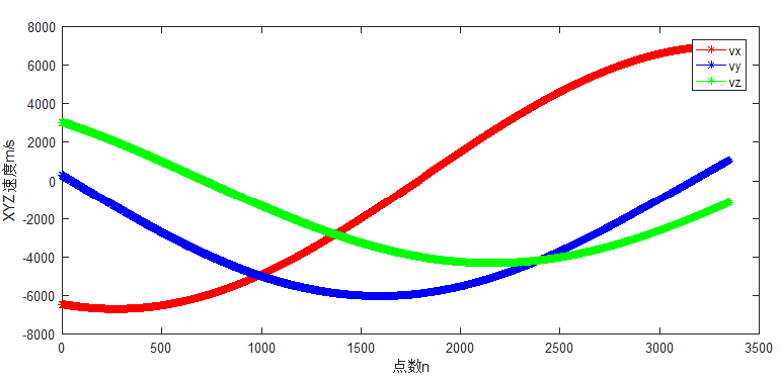
接收机运行后获得XYZ速度轨迹如下图所示
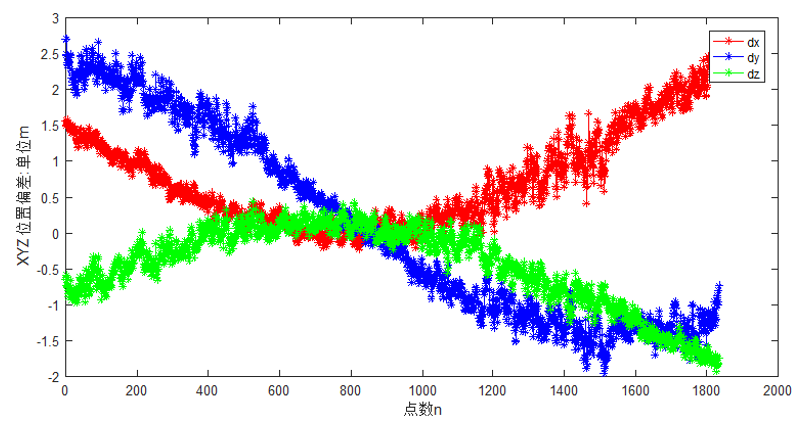
接收机运行后获得XYZ坐标与模拟器设置的坐标比对偏差如下图所示
接收机运行后获得XYZ速度与模拟器设置的速度比对偏差如下图所示
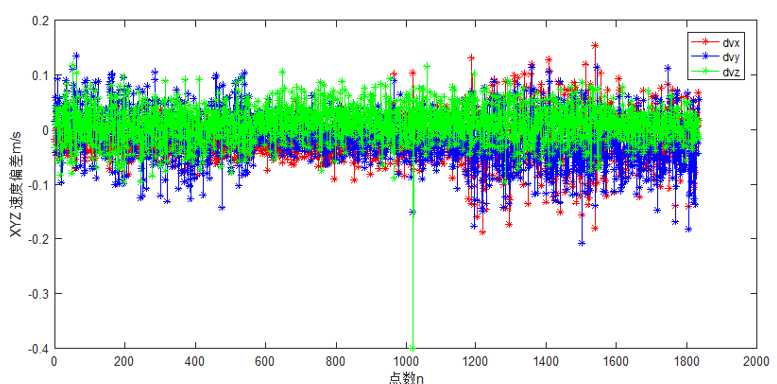
对比数据点求取标准差如下所示
x轴偏差 | y轴偏差 | z轴偏差 | xyz三轴偏差 |
0.9883 m | 1.3345 m | 0.7271 m | 1.8128 m |
Vx轴偏差 | Vx轴偏差 | Vz轴偏差 | VxVyVz三轴偏差 |
0.0413 m/s | 0.0459 m/s | 0.0344 m/s | 0.0707 m/s |
注:如本产品提供的功能和指标与用户最终需求有差异的地方,可接受定制。